
di FABRIZIO MAZZETTO
 |
| Figura 7 – “Walking Harvester” sviluppato dalla Plustech e successivamente acquisito dalla Timberjack (www.yumpu.com/en/document/view/35231662/walking-technology-jacobi22). |
Digitalizzazione del settore agro-forestale E’ ormai dagli anni ‘90 del secolo scorso che nel settore agrario si parla diffusamente di Agricoltura di Precisione (AP), termine che in tempi assai più recenti ha invaso, sebbene in modo meno pervasivo, anche il settore forestale ove si vanno diffondendo diverse tecniche anche per la cosiddetta Silvicoltura di Precisione (SP). Tuttavia, il concetto di precisione associato alle pratiche agroforestali ha generato negli anni non poca confusione e perplessità. In Italia, ha iniziato a diffondersi associandosi alla capacità di individuare con esattezza - teoricamente in ogni “punto” di un campo - le esigenze nutritive, lo stato fitosanitario e la produttività delle colture in una specifica localizzazione spaziale, caratterizzata da una superficie di diversi ordini di grandezza inferiore a quella dell’intero campo di riferimento, talvolta spingendosi fino ad indicare l’esatta localizzazione di una singola pianta (aspetto, questo, peraltro fondamentale in campo forestale). Pertanto, il concetto di “precisione” si limitava a funzionalità spaziali e cartografiche.
Da qui anche il termine, molto meno noto, di “agricoltura a gestione sito-specifica”, accompagnata dalla necessità di utilizzare dei sistemi di posizionamento satellitari per determinare con sufficiente “precisione” – per l’appunto – la posizione della macchina sul campo, agendo poi con dei sistemi automatizzati a bordo delle macchine agricole per la somministrazione di fertilizzanti o prodotti fitosanitari in dosi calibrate sulle specifiche esigenze agronomiche proprie di quella particolare localizzazione. Se ciò da un lato ha contribuito a creare nuove aspettative e suggestioni per un nuovo modo di fare agricoltura, dall’altro ha anche subito messo in evidenza nuovi tipi di difficoltà nella gestione delle imprese agricole, specie sul fronte della enorme quantità di dati da gestire, direttamente a carico degli agricoltori. Infatti, questi hanno dovuto subito fare i conti anche con la scarsa o nulla digitalizzazione del settore, non ancora adeguata ad affrontare con la dovuta determinazione le sfide che queste nuove tecnologie richiedevano anche sul piano gestionale.
Non è un caso che negli Stati Uniti, spesso ritenuti la culla della AP, quest’ ultima sia stata più correttamente definita come strategia gestionale che utilizza tecnologie informatiche per raccogliere dati da fonti multiple in vista di un loro successivo utilizzo nell’ambito di decisioni riguardanti le attività produttive di campo. Questo approccio più esaustivo cambia completamente la prospettiva del problema. Infatti, le priorità di intervento si spostano dalla gestione dei processi (più o meno automatizzati) alle attività di monitoraggio. In agricoltura, la raccolta e la gestione dei dati di processo ha sempre comportato non pochi problemi. E ora l’AP rende improcrastinabile la soluzione di tali problemi. Inoltre, dato che l’AP necessita di maggiori quantità di dati rispetto alle esigenze gestionali del passato, anche il monitoraggio stesso delle attività richiede l’impiego di adeguate tecnologie per realizzare nel modo più automatico possibile la raccolta di questi dati. In definitiva: non esiste AP senza la possibilità di ricorrere all’uso di tecnologie informatiche. Ed è proprio in quest’ottica che va inquadrato il tanto discusso problema della digitalizzazione dell’agricoltura. La loro adozione deve avvenire mente, ritagliandosi sulle specifiche esigenze ed indirizzi produttivi delle singole aziende, magari partendo con l’acquisizione di semplici dispositivi che risolvono problemi immediati nella conduzione delle macchine – si pensi, ad esempio, ai sistemi di guida assistita o automatica a bordo dei trattori utilizzati in risaia – per poi estendersi progressivamente a funzioni gestionali più complesse che richiedono una digitalizzazione della cartografia aziendale per la pianificazione e valutazione a posteriori delle attività svolte.
Ma a questo punto diventa necessario definire senza ambiguità cosa si intende realmente per digitalizzazione, dato che oggigiorno quasi tutto ciò che ci circonda include componenti digitali di varia complessità. Anche alla luce di quanto già esposto, in questa sede per digitalizzazione di un sistema produttivo si intende l’introduzione nel sistema stesso di tecnologie informatiche (hardware e software) che consentano di automatizzare le varie fasi dell’uso delle informazioni all’interno di processi decisionali, indispensabili al conseguimento degli obbiettivi produttivi del sistema di riferimento. Tali fasi includono tutti i passaggi con cui un dato grezzo (= messaggio proveniente dal sistema produttivo reale) si trasforma in informazione (= messaggio elaborato ed interpretato, necessario a prendere una decisione). L’intera trasformazione dato grezzo —> informazione è descritta schematicamente in Fig.1, ove si evidenziano le fasi di:
- A. Monitoraggio, relativo all’uso di strumenti digitali per acquisire dati grezzi relativi a: i) ambiente in cui ha luogo l’attività produttiva (monitoraggio ambientale), ii) aspetti e caratteristiche delle entità costituenti l’oggetto principale dell’attivit à produtt iva (monitoraggio produttivo, che per il settore agroforestale assume anche le denominazioni di monitoraggio colturale o monitoraggio forestale); iii) modalità con cui vengono eseguiti i singoli processi dell’attività produttiva (monitoraggio operativo);
- B. Elaborazione, relativa a tutte le procedure standard di trattamento dei dati (archiviazione, calcolo, selezione, aggregazione, integrazione, inferenze statistiche etc.) che hanno luogo dopo la loro raccolta, inclusele funzioni di archiviazione (database) nonché tutte le forme di elaborazione grafica (mappe digitali su GIS, elaborazioni tridimensionali su CAD etc.);
- C. Valutazione, relativa alle procedure di analisi che si attivano per poter pervenire ad un giudizio di merito riguardante i dati fin qui acquisiti e trattati; sicuramente, rappresenta la fase cognitivamente più complessa da automatizzare, essendo l’ambito in cui si esercitano le funzioni di analisi e controllo da parte dei responsabili delle attività produttive, sino a esprimere valutazioni comparative sulle possibili decisioni da intraprendere; in questa fase, pertanto, trovano utilizzo prevalentemente pacchetti software di varia natura, convenzionalmente classificati come sistemi di supporto alle decisioni (DSS, decision support systems) e alla gestione (MSS, management support systems); l’utilità di tali pacchetti non è tanto quella di fornire risposte ottimizzate, quanto piuttosto di favorire un’elevata interattivitá tra analista (spesso coincidente col decisore) e sistema di calcolo;
 |
| Figura 1 - Schema concettuale delle fasi con cui un “dato grezzo” si trasforma in “informazione”. La trasformazione completa prevede di concludersi con processi decisionali che generano: i) o nuove azioni nell’impresa (percorso 2-3); ii) o attività di tracciabilità attraverso la generazione di documentazione destinata a figure esterne all’impresa (percorso 2-4). Il percorso 1-3 e’ tipico dei processi ad elevata automazione. |
- D. Utilizzo, relativo all’ambito in cui le informazioni vengono impiegate nei processi decisionali con forme di utilizzo: i) intra-aziendali, ovvero quando le decisioni si traducono in un’azione di processo sul sistema produttivo; ii) extra-aziendali, quando le decisioni si traducono in documentazione per esporre fatti verso entità esterne al sistema produttivo, per soddisfare esigenze di certificazione o tracciabilità.
Ne consegue che non basta la presenza di un semplice computer in un ufficio per parlare di digitalizzazione nei termini sostanziali di cui sopra, specie se questo si limita ad una connessione alla rete internet o alla semplice erogazione di servizi di “office automation” (videoscrittura, foglio elettronico, e-mail, etc.). Benché quest’ultima sia ovviamente essenziale (in quanto indispensabile alle funzioni della succitata fase B), la digitalizzazione delle funzioni di un sistema produttivo si deve articolare armonicamente su piú fasi del ciclo dato —> informazione, supportata da componenti hardware e software distribuiti nei diversi ambiti e tra loro connessi in modo da automatizzare integralmente o parzialmente le fasi più rilevanti del ciclo di trasformazione all’interno del ciclo produttivo. Va subito sottolineato che le forme di reale digitalizzazione del settore realizzate attraverso questi approcci sono ancora molto limitate.
Studi recenti evidenziano che a livello nazionale le imprese agrarie digitalizzate sono ancora mediamente inferiori al 5% del totale. Tra queste, quelli che poi fanno anche concretamente ricorso a soluzioni AP vere e proprie si riducono ulteriormente al 2%. Anche la situazione negli altri paesi europei e negli Stati Uniti, benché più favorevole, non gode comunque di incidenze elevate. Nel settore forestale, poi, la situazione è ancora più critica dato che le tecnologie digitali sono al momento veicolate soprattutto dalle imprese forestali che fanno uso di mezzi ad elevata automazione quali i processor forestali, poco diffusi nella meccanizzazione della silvicoltura nazionale. Siamo, tuttavia, in un momento favorevole ad una crescita del digitale in tutti i settori. Non solo per le nuove generazioni, con consuetudini più radicate nell’uso delle tecnologie informatiche, ma anche per il “trascinamento culturale” causato dalla cosiddetta “Industria 4.0” che ha portato all’attenzione di tutti le nuove frontiere tecnologiche connesse all’”Internet delle cose” (IoT), ai Big Data, al Cloud Computing, all’iperconnetività e alla cibernetica, alla realtà aumentata.
Tanto che nel tentativo di inseguire questa nuova “moda tecnologica” diventa sempre più raro parlare ancora di Agricoltura di Precisione, preferendo ad essa i nuovi termini di Agricoltura 4.0 o Smart Agriculture. La Fig. 2 propone un confronto del “conteggio delle ere produttive” tra agricoltura e industria, cercando di spiegare anche cosa si cela dietro il famoso marchio “4.0” che spesso rischia di essere ridotto al mero inseguimento di una moda. Risulta evidente che sia per l’agricoltura sia per l’industria siamo ormai da tempo entrati nella quarta fase delle rispettive fasi di evoluzione tecnologica. C’è solo un piccolo particolare: prima dell’Industria 4.0 si è avuta - indicativamente tra il 1970 e il 2010 - la fase della Industria 3.0. In questi 40 anni, il settore industriale ha avuto modo di sviluppare e consolidare la propria trasformazione digitale. Purtroppo, lo stesso non si può dire sia avvenuto anche in agricoltura, dato che nella fase che potremmo indicare come Agricoltura 3.0 le innovazioni tecnologiche del settore hanno contribuito a migliorare la qualità della meccanizzazione nei settori dell’elettronica, dell’ergonomia e della sicurezza, con risultati molto più limitati in campo informatico. Ed è proprio questo “gap informatico” che strategicamente si deve superare per poter affermare con forza tutte le varie innovazioni tecnologiche proponibili con l’AP.
In campo forestale, questa distinzione risulta ancora più ardua. Molto approssimativamente, si potrebbe affermare che fino alla fase 2.0 - ovvero indicativamente fino agli anni ‘80 del secolo scorso - le evoluzioni tecnologiche in agricoltura e selvicoltura sono proseguite lungo un percorso comune, diversificandosi solamente dalle successive fasi 3.0, in cui anche in campo forestale si è iniziata a promuovere innanzitutto una elevata sensibilizzazione sulle problematiche dell’ergonomia e della sicurezza, prolungandosi peraltro almeno di un decennio oltre la fine osservabile peril settore agricolo, pur sviluppando al suo interno esempi di sviluppo di soluzioni ad alta automazione, come i già citati “processor”, comunque inquadrabili più come innovazioni meccatroniche (con automazioni spinte sui singoli sistemi, anche del tutto isolati) che non come rivoluzioni cibernetiche (la cui essenza risiede nell’iperconnettività e nella capacità di dialogo tra sistemi distribuiti). Da questo punto di vista, è più complicato stabilire una sorta di data d’inizio per la cosiddetta Foresta 4.0. Indubbiamente, essa è successiva alle proposte della Industria 4.0 e sicuramente ha potuto usufruire delle innovazioni nel frattempo acquisite in campo agrario.
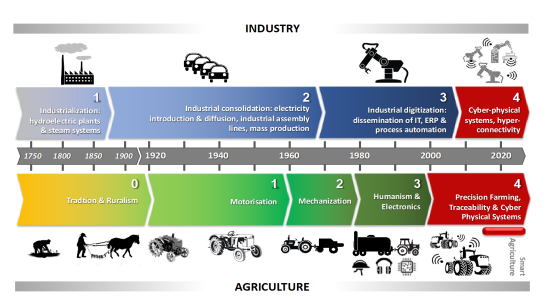 |
| Figura 2 – Confronto tra le ere produttive succedutesi nei settori industriale ed agrario. L’attuale Industria 4.0 segue la fase Industria 3.0 in cui si è avuto l’affermarsi delle tecnologie informatiche. Tale fase non si è avuta in agricoltura, in cui la terza fase ha visto l affermarsi solo dei dispositivi elettronici. L’Agricoltura 4.0 coincide con la Agricoltura di Precisione, che nei suoi stadi più recenti ha assunto la connotazione di Smart Agriculture. |
Foresta 4.0
In assonanza con quanto detto in precedenza, la “digitalizzazione delle foreste” dovrebbe correttamente prevedere il corretto impiego di tecnologie informatiche in grado di produrre informazioni a supporto dei processi decisionali attuabili nei contesti gestionali forestali. Ciò seguendo un approccio integrato basato sull’evoluzione della trasformazione dato —> informazione secondo le logiche di acquisizione dei dati (A), elaborazione (B), valutazione (C) e utilizzo delle informazioni (D) illustrate in precedenza. A differenza dei contesti agrari, le foreste rappresentano sistemi in cui le funzioni produttive da reddito vengono spesso sostituite (o fortemente integrate) con quelle proprie dei servizi ecosistemici. Come tali, sovente sfuggono alle logiche strettamente connesse all’efficienza economica d’impresa, prevedendo l’erogazione di benefici multipli legati alla fruibilità pubblica di larghi settori della società, nonché’ degli altri ecosistemi naturali con cui si trovano ad interagire. In tale contesto, le funzioni della digitalizzazione al momento sono ancora prevalentemente concentrate sull’automazione del monitoraggio, con focus sugli stati fisiologici e sanitari della vegetazione, sull’inventario delle comunità vegetali, sulla gestione degli interventi di manutenzione, sulla circolazione della fauna, sul controllo preventivo di eventi accidentali dannosi (es.: rischio di incendi). I componenti tecnologici che consentono di realizzare tali obbiettivi, sono riassumibili come segue:
Tecnologie per il rilevamento dei dati: altrimenti note come “sensing technology”, includono sia tutti i componenti hardware preposti alla acquisizione vera e propria dei dati grezzi (ovvero: sensori, sistemi di identificazione, sistemi di posizionamento, data-logger), sia i componenti software necessari alla elaborazione, interpretazione e rappresentazione dei dati raccolti (ovvero: GIS e CAD, tool di inferenza statistica e geostatistica, procedure di machine learning); si tratta, pertanto di componenti che rientrano, rispettivamente, nelle succitate fasi A e B del ciclo di Fig. 1; di fatto, tali tecnologie permettono la creazione di un ambiente di interconnessione tra mondo fisico e virtuale, essendo quest’ultimo ció che effettivamente viene rappresentato in modo formale all’interno della struttura del sistema informativo.
Tecnologie per agevolare le interazioni uomoforesta: i dati memorizzati in un sistema informativo devono essere sempre disponibili ai decisori sempre e ovunque, senza limitazioni di natura spaziale (accessibilità) o temporale (continuamente online); se ciò è dato per scontato per le applicazioni gestionali classiche per lo più confinante nello spazio di pochi uffici, ben diversa è la situazione per tutti i processi di esecuzione e controllo delocalizzati su vaste estensioni territoriali; d’altro canto, il requisito di “iperconnettività” – come detto - rimane vincolante per l’implementazione di ogni sistema cyberfisico, Foresta 4.0 inclusa; i componenti tecnologici abilitanti tali funzioni riguardano sia le tecnologie di comunicazione e trasferimento dati (es. Wi-Fi, GPRS, 4G, 5G, Zigbee, LoRa etc.) sia i vari supporti fisici che rendono direttamente accessibili le informazioni in pieno campo (dispositivi cellulari, laptop, palmari etc., ovviamente opportunamente configurati con funzionalità touchscreen nonché per resistere a condizioni estreme di utilizzo connesse a rischi per elevate condizioni di umidità e polveri, urti e cadute); sempre più frequentemente, tali dispositivi vengono anche integrati nei cruscotti di controllo delle attrezzature forestali; questi ultimi componenti rientrano nelle succitate fasi C e D del ciclo di Fig. 1, essendo impiegati sia per effettuare valutazioni, sia per prendere decisioni in campo.
Big Data e Cloud Computing: la combinazione tra esigenze di monitoraggio, ambienti delocalizzati e iperconnettività comporta dei notevoli problemi in termini di moli di dati da trattare, interpretare, archiviare e trasferire; il termine Big Data nasce con l’Industria 4.0 e si riferisce alle difficoltà che le imprese devono affrontare quotidianamente nel gestire grandi volumi di dati, di regola molto eterogenei, strutturati e non strutturati, in modo rapido ed efficiente, in vista del loro utilizzo in processi decisionali. Tutto ciò comporta la necessità di avere adeguati strumenti sia di interpretazione sia di archiviazione, spesso al di fuori delle competenze delle imprese, specie se di piccole dimensioni (in termini soprattutto economicofinanziari, come normalmente accade per le imprese forestali); la formula del cloud computing si rivela in moltissime situazioni estremamente vantaggiosa per risolvere questi problemi; esso consiste nella distribuzione di servizi di calcolo e archiviazione (server, database, software particolari) attraverso connessioni in remoto effettuabili attraverso una normale rete internet, demandando in tal modo a servizi “outsourcing” importanti funzionalità altrimenti molto complesse e costose da acquisire e gestire; risulta essere una soluzione molto flessibile che non richiede investimenti, bensì solamente l’acquisto di pacchetti di servizi modificabili a seconda delle esigenze. Il cloud computing consente anche di rivisitare la logica realizzativa e gestionale dei sistemi informativi. Infatti, sempre con riferimento a Fig. 1, gran parte delle funzionalità delle fasi B (archiviazione e processamento), C (supporto alla valutazione) e D (tracciabilità) possono essere spostate nel “cloud” (= sito remoto accessibile tramite rete) semplificando molto struttura e gestione del sistema informativo.
Advanced Analytics (AA) e Intelligenza Artificiale (IA): rappresentano, forse, la vera frontiera tecnologica delle tecnologie informatiche e dell’Industria 4.0, a tutto vantaggio delle problematiche connesse ai Big Data e grazie al supporto del Cloud Computing. Gli AA raggruppano componenti software molto sofisticati con tecniche di calcolo avanzate, spesso sviluppati per specifiche applicazioni, di norma utilizzati in processi di inferenza e interpretazione delle informazioni, specie quando ottenute attraverso l’integrazione di dati da fonti multiple (data fusion). Come tali, rappresentano tipici componenti della fase B di Fig. 1, spesso integrati anche con supporti grafici su mappe digitali (GIS o CAD) o su tool deputati all’analisi delle immagini. Per la Foresta 4.0, un esempio ricorrente riguarda tutti gli algoritmi basati sul trattamento di dati da monitoraggi ottici (con sensori multispettrali e/o LiDAR) per la valutazione dello stato della copertura vegetale di una foresta, facendo anche uso di procedure di “segmentazione” (PCS = Point Cloud Segmentation) per il riconoscimento delle proprietà strutturali di singole piante (Fig. 3). Per quanto riguarda l’IA, invece, il salto concettuale è ancora più spinto, dato che il suo obiettivo è quello di dotare i componenti tecnologici del sistema con la capacità di imparare in modo autonomo dall'osservazione e dall'esperienza, attraverso ragionamenti induttivi in grado di prendere decisioni autonome e di agire. In tale ambito, è lecito attendersi tempi di sviluppo ancora molto lunghi, benché il mondo della ricerca sia in merito molto attivo su molti fronti applicativi, specie sul fronte delle produzioni industriali e della ricerca biomedica. Comunque sia, in prospettiva i componenti di questa categoria saranno impiegabili nelle fasi C e D di Fig. 1 e costituiranno la base per tutte le future applicazioni robotizzate.
 |
| Figura 3 – Esempi di applicazioni per il riconoscimento delle chiome di singoli alberi derivate da ricognizioni aeree LiDAR in foresta. Gran parte degli algoritmi si basano su metodi denominati Point Cloud Segmentation (PCS) che svolgono computazioni su nuvole di punti tridimensionali. Gli algoritmi consentono anche di ottenere l’altezza delle singole piante. |
Verso un Internet degli Alberi?
In base a tutto quanto detto in precedenza e conseguentemente al fatto che molte delle funzioni di iperconnettività previste dalla Foresta 4.0 verranno gestite tramite connessioni wireless usufruendo di un accesso a internet, recentemente è entrato in uso anche il termine di “Internet of Trees”, con ciò ammiccando al termine “Internet of Things” (IoT = Internet delle Cose, o meglio “Internet degli Oggetti”) che si basa sull’idea di oggetti “intelligenti” tra loro interconnessi in modo da scambiare le informazioni possedute, raccolte e/o elaborate. In pratica, in un contesto altamente cibernetico, i sistemi informativi saranno composti da svariati componenti (=oggetti) totalmente distribuiti nello spazio benché comunque in costante comunicazione tra loro grazie ad un “bus virtuale” rappresentati da una rete internet. Tutti gli oggetti sono dotati di un protocollo di comunicazione per farsi riconoscere, per individuare i destinatari delle informazioni nonché per rendere in chiaro le informazioni trasmesse. In altre parole: ogni componente di un sistema informativo diventa un oggetto del contesto produttivo che acquista una propria identità nel mondo digitale. Avendo a che fare con ampi spazi ed oggetti delocalizzati, i sistemi di trasmissione sono solitamente organizzati attraverso dei “nodi tecnologici” verso cui convergono sensori, sistemi di identificazione, supporti di memorizzazione, dispositivi di alimentazione (batterie) necessari a garantire la funzionalità di tutti gli oggetti connessi a quel nodo.
I nodi, poi, possono essere: a) fissi (singoli alberi, punti di stoccaggio, strutture idrauliche o forestali, micro-stazioni di rilevamento meteorologico o pedologico, punti di ripresa fissi per il monitoraggio di incendi etc.); b) mobili (tipicamente quando connessi ad attrezzature del sistema informativo gestite da personale in movimento sul territorio). I nodi fissi riguardano applicazioni solitamente connesse al monitoraggio ambientale o produttivo, mentre quelli mobili riguardano situazioni piú frequentemente connesse al monitoraggio operativo. Per i nodi fissi, uno dei problemi maggiori riguarda l’alimentazione energetica del sistema. Le situazioni più favorevoli sono quelle che garantiscono lunghi periodi di autonomia grazie alla presenza di piccoli pannelli fotovoltaici. Nel caso di sistemi con batteria, tra le informazioni trasmesse vanno sempre riportati eventuali alert sullo stato di carica dei dispositivi, in modo da programmare interventi di manutenzione in loco con la dovuta tempestività. Benchè i nodi fissi spesso non richiedano la presenza di un sistema di posizionamento (sarebbe sufficiente memorizzare la posizione al momento dell’installazione del nodo), spesso vengono comunque inclusi per sfruttare la sincronizzazione dei dati offerta dall’orologio di alta precisione in dotazione ai sistemi GNSS (Global Navigation Satellite System). Di contro, nei sistemi mobili, i ricevitori GNSS sono sempre essenziali per contestualizzare nello spazio i contenuti dei dati raccolti. La trasmissione dati in modalità wireless nei sistemi con reti a nodi fissi avviene spesso con trasferimenti tra nodi contigui, e i nodi nel loro insieme vanno a formare l’infrastruttura di base della rete di comunicazione. Una soluzione che negli ultimi anni sta riscuotendo un notevole successo in tal senso in campo agro-ambientale è costituita dalle reti LoRa (= tecnologia wireless a radiofrequenza Long Range). Questa tecnologia utilizza bande di radiofrequenza libere a 433 MHz (o 868 MHz) e consente trasmissioni a basso consumo energetico anche su lunghe distanze (oltre 10 km nelle zone rurali in campo aperto, 3–5 km in zone fortemente urbanizzate, con valori intermedi per le foreste).
Il vantaggio dei dispositivi LoRa risiede, per l’appunto, nella loro facilità di installazione e manutenzione, grazie soprattutto anche alle richieste energetiche contenute. Sono molto usati per monitoraggi ambientali in specifici punti di osservazione, al servizio sia di sistemi di sensori multipli, sia in associazione a punti di ripresa con videocamere per controlli specifici (movimento fauna locale, rischio incendi, depositi in alveo etc.). Diversamente, le reti con nodi mobili sono tipiche delle attività di monitoraggio operativo con dispositivi in genere associati a macchine o attrezzature impiegate in specifiche operazioni che richiedono spostamenti sul territorio da parte del personale addetto. In tal caso la trasmissione dati tra nodi contigui diventa decisamente più problematica, dato che non si ha mai la sicurezza di mantenere una continuità tra nodi in movimento (esistono comunque in tal senso anche esperienze condotte con dispositivi Zigbee che, pur garantendo bassi consumi analogamente ai dispositivi LoRa, operano tuttavia su trasmissione a più corto raggio). L’affidabilità della trasmissione dati su reti a nodi mobili si realizza prevalentemente con soluzioni a lungo raggio con protocolli delle tecnologie cellulari. L’avvento della banda larga 5G – di cui oggi molto si discute - sicuramente dará un grosso impulso al settore, superando molti degli attuali vincoli tecnologici in merito a velocità e volumi di dati trasmessi. Al momento, tuttavia, alcune semplici applicazioni utilizzano ancora soluzioni GPRS. Va detto che la tecnologia cellulare, benché estremante flessibil, comporta ancora costi sensibili, dato che ci si deve appoggiare ad un operatore telefonico con relativi costi di gestione (anche se molto più bassi rispetto al traffico vocale, il traffico dati comporta costi di abbonamento ancora sensibilmente elevati, specie a fronte della necessità di connettere centralmente numerosi nodi). Comunque sia, anche l’organizzazione dell’Internet of Trees va sempre configurata secondo le logiche di un sistema informativo, mettendo sempre in primo piano quali problemi e quali tipi di decisioni il sistema deve poter affrontare e risolvere. L’articolazione in nodi, congiuntamente a tutti i loro singoli componenti e relativi sistemi di trasmissione, non rappresenta nient’altro che un intero componente del sistema informativo più generale. Come tale, deve soddisfare a ben precisi requisiti decisionali. In merito, e’ utile sottolineare gli aspetti che seguono:
- In campo forestale, si possono avere due principali tipi di problemi decisionali da affrontare: a) problemi legati strettamente ad aspetti di monitoraggio ambientale (con attività ricognitive più o meno permanenti, tipiche di osservatori, consorzi o parchi di tutela, centri di ricerca, protezione civile), ove prevalgono le funzionalità di un corretto funzionamento della foresta come servizio ecosistemico nelle sue diverse forme; b) problemi tipici della funzione produttiva, con la necessità di monitorare tutti gli aspetti connessi all’approvvigionamento e alle rese del legname; in alcune situazioni, le due tipologie di problemi possono anche coesistere.
- Benché si parli di “internet degli alberi”, le singole piante non vanno mai intese come componenti del sistema informativo, bensì come entità del sistema produttivo: non vanno, pertanto, mai identificate singolarmente, a meno di esigenze particolari (monitoraggi specifici connessi a particolari funzioni ecosistemiche o produttive); più in generale, l’identificazione di singole piante o gruppi di piante può risultare necessaria in particolari situazioni (es. : identificazione delle piante da abbattere in un bosco, coerentemente con i piani di assestamento e gestione forestale, attività per la quale da tempo immemorabile esiste la prassi della cosiddetta “martellata”); in tali casi, si possono utilizzare specifici componenti hardware o software (sistemi di identificazione tramite RFID, ricevitori GNSS, algoritmi di segmentazione su set di dati ottenuti da scansioni LiDAR aeree) che attraverso opportune procedure possono il più delle volte adeguatamente soddisfare tali esigenze.
- Analogamente a quanto avviene per il settore agrario, anche nella gestione forestale si fa largo uso di monitoraggi da ricognizioni aeree; le informazioni ottenibili sono diverse, a seconda del tipo di sensore ottico con cui il vettore aereo (UAV, ultraleggero, aereo, satellite) è equipaggiato; il sistema informativo deve essere progettato in modo tale da poter integrare tali informazioni – in modo automatico o interattivo - con le reti di monitoraggio a nodi fissi e/o mobili.
Casi di studio
In campo forestale gli esempi di applicazioni della cosiddetta Foresta 4.0 hanno avuto una notevole accelerazione nel corso degli ultimi anni, sicuramente anche sulla scia delle esperienze acquisite in altri settori. Vista l’ampia casistica, in questa sede si preferisce concentrare l’attenzione sui problemi connessi alle funzioni gestionali e produttive delle foreste, e in particolare su alcune esperienze maturate sul fronte del monitoraggio operativo. Le attività ad esso correlate sono tra le più complesse da gestire, dato che includono l’osservazione, la registrazione e la documentazione di tutte le informazioni che sono indispensabili per avere – a posteriori – un quadro generale esaustivo delle modalità con cui sono stati eseguiti i processi di campo e di trasporto finalizzati alla produzione forestale. In questo tipo di monitoraggio, prevalgono i processi di identificazione rispetto a quelli di misura. Infatti, per riconoscere in modo completo un evento si devono concettualmente identificare: 1) aspetti temporali (data e durata); 2) i principali attori che vi hanno preso parte: motrice, operatrice, attrezzo manuale, esecutore (comunque non obbligatorio per la normativa sulla privacy); 3) luogo di lavoro; 4) quantità di lavoro eseguito; 5) modalitá di esecuzione (ovvero, con l’articolazione in fasi di lavoro); 6) consumi di combustibile; 7) eventuali materiali coinvolti (raccolti o distribuiti). Solo i precedenti punti 4) e 6) sono concettualmente associabili a misure tramite sensori, benché esista la possibilitá di ottenere delle stime derivabili associando aspetti temporali e caratteristiche delle attrezzature utilizzate. Nel caso forestale, il monitoraggio operativo risulta di notevole utilitá per raccogliere in modo del tutto automatico le informazioni relative alle operazioni di abbattimento e di esbosco del materiale legnoso.
Nel caso dell’abbattimento con interventi manuali, il nodo (mobile) di raccolta dati viene allestito sulle motoseghe. In merito, si sono realizzati dei prototipi di datalogger con l’obbiettivo di utilizzare i dati ottenibili sulle loro condizioni di funzionamento per stimare: a) la posizione degli alberi abbattuti (con ciò realizzando anche l’identificazione di una singola pianta); b) il volume degli stessi; c) i tempi di lavoro per l’abbattimento e le successive sramature. In tali circostanze è essenziale ridurre quanto più possibile le dimensioni del datalogger, dato che esso deve essere incorporato nella struttura della motosega. Si hanno pertanto a disposizioni spazi estremamente limitati la cui occupazionie con nuovi dispositivi non deve peraltro andare ad alterare l’operatività del boscaiolo con masse aggiuntive troppo pesanti, quali possibili cause di riduzione di visibilità e sovraffaticamento per aumento di peso e vibrazioni. Uno dei prototipi realizzati a tale scopo è indicato in Fig. 4. Il suo alloggiamento è stato ricavato all’interno di un involucro protettivo in materiale plastico, di forma perfettamente aderente al carter della motosega e collocato nella parte superiore del motore, in modo da bilanciare pesi e vibrazioni in fase di lavoro. Il dispositivo include: i) un ricevitore GNSS, di precisione idonea (< 1,0 m) per le condizioni di parziale schermatura del sottobosco, ii) una piattaforma inerziale per la misura dell’inclinazione dello strumento e delle intensità di vibrazione su tre assi di riferimento, iii) un dispositivo di trasmissione dati GPRS, con relativa scheda SIM. La stima dei volumi delle piante abbattute sfrutta la correlazione positiva esistente tra tempo di taglio (su una sezione perpendicolare all’asse del tronco) e il diametro dell’albero (più in dettaglio, si possono riscontrare relazioni perfettamente lineari tra tempi e sezioni di taglio). Pertanto, la misura dei tempi di taglio osservabile con l’ampiezza delle vibrazioni al di sopra di una certo valore limite come indicato sempre in Fig. 4 (il tasto dell’acceleratore è sempre pigiato al massimo durante il lavoro effettivo), riconduce rapidamente ai diametri delle relative piante abbattute.
Da qui, poi si risale all’altezza della pianta in modo o indiretto (tramite delle tabelle di ne, specifiche per ogni specie e giá normalmente in uso per i tagli manuali), o diretto (misurando gli spostamenti a terra della motosega tramite il ricevitore GNSS durante la fase di sramatura, quando non direttamente ricavabili da rilievi territoriali analoghi a quelli indicati in Fig. 3). Si tenga presente che la piattaforma inerziale misura anche l’inclinazione di taglio della motosega, con ciò distinguendo tra tagli di abbattimento e tagli per la formazione delle tacche per indirizzare la direzione di caduta (che richiedono l’inserimento di coefficienti correttivi rispetto ai tempi di un taglio di abbattimento continuo), nonché i tagli durante la sramatura. Una volta stimati diametri e altezze, la stima dei relativi volumi di legname fresco è subito fatta. In definitiva, questo dispositivo consente di realizzare una sorta di “motosega gente”, in grado di fornire in modo del tutto automatico posizione e volumi delle piante abbattute, insieme ai relativi tempi di lavoro. Con ció realizza una sorta di “fusione” tra monitoraggio operativo e produttivo, di notevole utilitá specie quando associato ai piani di abbattimento previsti per un determinato contesto forestale. Un altro caso di applicazione del monitoraggio operativo in Foresta 4.0 riguarda il funzionamento delle gru a cavo, utilizzate per le operazioni di esbosco.
 |
| Figura 4 – Prototipo di “motosega intelligente” realizzato per consentire il monitoraggio operativo delle operazioni di abbattimento manuale in foresta. In realtà, il dispositivo realizza anche una sorta di monitoraggio produttivo, essendo in grado di effettuare anche una stima dei volumi delle piante trattate. A) vista del prototipo, con posizione del carter protettivo che include tutti i componenti di registrazione; B) Esempi di registrazione di vibrazioni e loro corrispondenza coi tagli effettuati (dalla durata dei tempi di taglio è possibile risalire alle sezioni di taglio e – successivamente – ai volumi delle piante abbattute). |
I carrelli motorizzati in movimento su fune - cui si agganciano i tronchi previamenteabbattuti, sramati e pezzati – diventano nodi di acquisizione dati. Il controllo dei loro movimenti tramite il solito dispositivo GNSS consente di temere sotto controllo le diverse fasi di lavoro (viaggio di andata a vuoto, concentramento del legname e aggancio dello stesso alla gru, esbosco con viaggio di ritorno sotto carico, sgancio all’imposto). Anche in questo caso, si possono realizzare misure indirette sulle masse trasportate, avendo la possibilità di risalire (sempre attraverso i rilevi con GNSS) alle variazioni in altezza per la flessibilità delle funi sollecitate dai passaggi del carrello a vuoto e sotto carico. Stime più precise si possono, altresì, ottenere introducendo (Fig. 5): i) un dinamometro (cella di carico) per misurare la forza peso risultante in fase di trasporto sotto carico; ii) un inclinometro per misurare l’angolo di inclinazione del cavo di aggancio rispetto alla verticale al suolo durante il trasporto stesso. Ciò deriva dalla necessità di considerare il fattoche nelle reali condizioni di lavoro la misura delle masse trasportate non è mai cosa semplice e di immediata realizzazione. La misura ideale sarebbe possibile solo col legname perfettamente sospeso da terra e a carrello fermo.
Nella realtà, i tronchi si agganciano al carrello in prossimità di una loro estremità, mentre quella opposta, durante il trasporto, normalmente striscia al suolo generando sollecitazione caotiche determinate dalle irregolarità sulla superficie del terreno. Tali sollecitazioni, ovviamente, interferiscono con la misura “precisa” del carico in quel momento presente, il tutto reso ancor piú complesso dalla flessibilità del cavo portante su cui grava il carrello. In definitiva, si tratta di rilievi affetti da un notevole “rumore” e l’utilizzo contestuale dei due sensori ha lo scopo di sfruttare giustappunto tale rumore per pervenire ad una stima del carico trasportato. Un apposito “motore di inferenza” (ovvero un modello interpretativo che integra il sistema di misura) fornisce stime indirette delle masse in gioco tenendo conto di tutti gli effetti combinati di cui sopra. Il fenomeno è sempre sinteticamente illustrato in Fig. 5, unitamente a esempi di validazione che hanno evidenziato risultati molto soddisfacenti (R2>0,9).Ovviamente, tali esperienze dimostrano che siamo solo all’inizio delle potenzialità della Foresta 4.0. Rimangono ancora molte sfide tecnologiche da realizzare, specie in relazione all’ingegnerizzazione dei dispostivi da associare ai nodi di monitoraggio, dispositivi che richiedono notevoli sforzi di miniaturizzazione coniugata a notevole robustezza viste le condizioni di lavoro estreme degli ambienti forestali.
 |
| Figura 5 – Schemi e principi di monitoraggio operativo sulle operazioni di esbosco tramite gru a cavo. L’obbiettivo è quello di stimare i tempi delle diverse fasi di lavoro (registro attivitá) congiuntamente alle masse trasportate in ogni ciclo di trasporto. |
Automazione dei processi e robotizzazione
Anche per la Foresta 4.0, ovviamente, le applicazioni digitali non possono non considerare tutte quelle innovazioni che portano a interventi diretti sulla gestione dei singoli processi attraverso soluzioni di spinta automazione se non – addirittura – di vera e propria “robotizzazione”. Soprattutto nell’ambiente forestale, caratterizzato da condizioni di lavoro estreme sempre con elevati rischi per la sicurezza degli operatori, la possibilità di sostituire parzialmente o integralmente le attività cognitive umane (specie nei processi piú rischiosi e di maggior fatica) ha da sempre rivestito un incredibile fascino a livello sia dei costruttori che del mondo della ricerca. Talvolta, ne sono usciti connubi che hanno poi portato alla realizzazione di prototipi sperimentali di varia complessità, Questi, tuttavia, raramente hanno raggiunto una piena maturità commerciale, sia per le dimensioni del mercato, sia per i differenti livelli di meccanizzazione forestale osservabile nei diversi paesi. In Europa, ad esempio, si osserva la grande dicotomia tecnologica tra la meccanizzazione forestale dei paesi nordici (con Finlandia e Svezia in testa) e quella dell’Europa meridionale dell’arco alpino e – soprattutto – del contesto appenninico. Si tratta di aree diverse per tradizioni, condizioni orografiche e geografiche, disponibilità finanziarie, che hanno favorito lo sviluppo di soluzioni altamente meccanizzate degli ambienti nordici rispetto a quelli meridionali, ancora prevalentemente incentrati con la gestione delle operazioni di esbosco con squadre di boscaioli muniti di motosega e successive attrezzature per l’esbosco aereo o a strascico con trattori forestali tradizionali.
Non è un caso che le prime versioni di processor su forwarder (forse da annoverare tra i veri primi esempi di automazione avanzata per la meccanizzazione forestale) siano state inizialmente proposte nel Nord Europa, per poi diffondersi gradualmente un pó ovunque, benchè nel nostro paese risultino ancora in numero molto limitato. Per queste macchine, le esigenze di digitalizzazione e iperconnettività si risolvono molto facilmente ricorrendo ai dispositivi di monitoraggio operativo già in uso presso i trattori dell’agricoltura tradizionale. In aggiunta, le specifiche di lavoro del processor possono essere memorizzate coi dettagli relativi ai singoli tronchi trattati (diametro, lunghezza dei ceppi, tempi di lavoro) realizzando interessanti integrazioni col monitoraggio produttivo. Rimanendo sugli aspetti gestionali, in tempi recenti si sono svolti anche studi per integrare il funzionamento dei processor su macchine operanti a punto fisso all’imposto con le soluzioni precedentemente descritte relative a motoseghe e gru a cavo “intelligenti”, realizzando una forma di monitoraggio integrale – associato anche alla misura delle biomasse raccolte – dall’abbattimento all’imposto. Con con ciò si viene ad offrire uno strumento completo per la tracciabilità dei prodotti forestali, di grande utilitá per la trasparenza e la qualità del lavoro che può essere garantito dalle imprese del settore (da cui il simpatico appellativo, mai ufficializzato, di “Lamberjack 4.0”), in grado di certificare in modo oggettivo qualità e quantità dei servizi di esbosco forniti. Le difficoltà culturali e finanziarie del settore, associate alle dimensioni di questo mercato, hanno tuttavia bloccato il definitivo sviluppo di tali sistemi, la cui fattibilità tecnologica rimane comunque ampiamente provata. Rimanendo sempre nel campo delle macchine forestali per la raccolta, sono state proposte diverse soluzioni teleoperate, specie per macchine di raccolta da associare al carico di carri forestali. E’ il caso, ad esempio, dell’Harvester GREMO Besten 106RH, costituita da una piattaforma motrice cingolata su tre assali, molto stabile essendo priva di cabina e con baricentro molto abbassato, al cui centro è installato un lungo braccio snodato equipaggiato alla sua estremità con la testata di un processor (Fig. 6).
La macchina non ha pertanto l’operatore a bordo ed è azionata dal guidatore del carro forestale, potendo anche seguire quest’ultimo nei suoi spostamenti. La cosa interessante è che il comando che attiva la funzionalità di controllo a distanza dell’harvester può essere passato a più carri, soddisfacendo così uno dei requisiti fondamentali degli approcci cibernetici dell’Industria 4.0 (ereditati anche dalla Foresta 4.0), ovvero la comunicazione M2M (Machine-To-Machine). I vantaggi di questa soluzione riguardano: a) i minori costi di acquisto della macchina rispetto agli harvester convenzionali; b) ridurre i tempi morti del lavoro del processor, evitando le interruzioni altrimenti necessarie per le fasi di trasporto; c) aumentare la produttività del cantiere prevedendo un numero di carri raccolta (forwarder) congruente con i tempi richiesti dalle distanze di trasporto fino all’imposto; d) la possibilità di integrare tutte le macchine in un sistema di monitoraggio operativo centralizzato, integrando anche le fasi di trasporto. Tale soluzione presente indubbi vantaggi per i requisiti della Foresta 4.0.
 |
| Figura 6 – Esempio di harvester teleoperato (modello GREMO Besten 106RH). Il controllo può essere condiviso da più forwarder con apprezzabili vantaggi operativi ed economici. |
Nel caso della meccanizzazione forestale nazionale, tuttavia, si devono fare i conti coi limiti strutturali cui si è accennato in precedenza. Spostando l’attenzione su soluzioni più vicine a logiche di robotizzazione, è sicuramente utile menzionare “Walking Harvester” sviluppato dalla Plustech e successivamente ceduto alla Timberjack (Fig. 7). Si tratta di una macchina in cui gli organi di propulsione convenzionali (ruote o cingoli) sono stati sostituiti da 6 gambe articolate azionabili singolarmente in modo altamente coordinato, in modo da realizzare spostamenti con dinamiche analoghe a quelle di una sorta di grande insetto intento a camminare. L’idea non è recente e nasce dalla necessità di trovare architetture meccanizzate capaci di affrontare gli ambienti più estremi in fatto di pendenza, irregolarità e portanza dei suoli. Ogni gamba termina con un basamento circolare rivestito in gomma, eventualmente attrezzato anche con delle catene superficiali, a simulare la fisionomia di un piede equipaggiato con scarpa chiodata. In tal modo si soddisfa anche l’obiettivo di un comportamento a salvaguardia dei suoli forestali, grazie a contatti puntuali con il terreno, senza lasciare tracce continue come normalmente avviene per le macchine a ruote o cingolate. Il Walking Harvester, pur non essendo un vero e proprio robot, ha certamente contribuito a introdurre la cultura della “tecnologia robotica” all'interno del settore forestale, in quanto il movimento delle gambe è coordinato integralmente e in modo autonomo da un computer di bordo.
Al guidatore rimangono in carico la scelta della direzione di avanzamento e il controllo delle operazioni di abbattimento.Nonostante questa pionieristica iniziativa, il percorso della robotizzazione dei processi forestali si presenta alquanto lungo e tortuoso. Sicuramente presenta maggiori difficoltà rispetto a quanto sta parallelamente maturando all’interno dell’agricoltura tradizionale. Le principali soluzioni finora acquisite in genere si fermano ad applicazioni con controllo remoto e/o teleoperato, principalmente riconducibili a due ambiti di intervento: 1) il controllo automatizzato del funzionamento delle gru a cavo (spostamenti autonomi del carrello senza interventi diretti dell’operatore, controllo della velocità, gestione della sistemazione dei tronchi all’imposto); 2) allestimento di forwarder in genere di piccole dimensioni, per il trasporto del legname su pendenze estreme e limitatamente a manovre in foresta. Non mancano, comunque, anche delle iniziative allo stadio pre-prototipale che propongono architetture di macchine decisamente inedite e avveniristiche. In merito, è opportuno segnalare il progetto della Barbro che propone un harvester ad azionamento totalmente autonomo, con struttura impostabile differentemente in base a tre modalità di lavoro: 1) trasporto, funzionante in modo convenzionale analogamente ad una macchina a 4 ruote motrici; 2) in arrampicata, utilizzando degli “artigli” meccanici per agganciarsi al tronco degli alberi, senza più alcun contatto al suolo e muovendosi spostando un singolo artiglio alla volta di albero in albero; 3) raccolta, utilizzando una sorta processor semplificato per procedere all’abbattimento di una pianta, una volta raggiunta la posizione desiderata. Uno schema generale di tale soluzione è indicata in Fig. 8. La macchina è in grado di assumere la configurazione necessaria in base a una delle tre modalità di lavoro richieste, permettendo di poter parlare di tecnologia robotica a tutti gli effetti. E’dotata di 4 bracci ripiegabili e ruotabili, con uno snodo a meta circa di ogni braccio in corrispondenza del quale si trovano le ruote. All’estremità del braccio si trovano gli artigli, combinati con gli organi di taglio per l’abbattimento. In fase di trasporto, i bracci si trovano in posizione di massima ritrazione, con artigli raccolti circa a metà del corpo macchina e ruote in posizione verticale con appoggio diretto al suolo.
L’idea rivoluzionaria consiste nella propulsione per arrampicata, con i bracci che si posizionano fino alla loro massima espansione per consentire un aggancio utile su uno degli alberi utilmente raggiungibili entro il raggio di controllo della macchina. Nel caso di foreste rade, a bassa intensità boschiva, la macchina e anche in grado di proporre una configurazione mista, facendo scende le ruote al suolo laddove non riesca a trovare alcun tronco utile per un aggancio in sicurezza. Probabilmente si dovrá attendere ancora qualche anno per vedere le possibili evoluzioni concrete in merito a tale iniziativa. Indubbiamente, essa ha già avuto il pregio di considerare cambiamenti radicali nelle modalitá di locomozione e di svolgimento dei processi, forse aprendo la strada ad altre possibili evoluzioni.
Quali orizzonti
In tutti i settori produttivi i processi di digitalizzazione hanno ormai intrapreso una evoluzione irreversibile. Il loro grado di successo dipenderà innanzitutto dalla robustezza culturale, strutturale, organizzativa ed economico-finanziaria di ogni settore, e sará misurabile attraverso l’efficacia degli interventi proposti nonché dalla tempestività con cui si potranno condividere in modo trasparente i risultati nelle principali applicazioni. Nonostante il notevole interesse riscontrato tra gli operatori del settore, in agricoltura queste iniziative procedono tendenzialmente a rilento (a parte qualche settore specifico individuabile nelle imprese zootecniche e agromeccaniche), non avendo ancora chiari riscontri di adozioni di massa per le principali tecnologie proposte. Per il settore forestale, nonostante l’originalità e l’efficacia di molte soluzioni già sul mercato, la situazione sembrerebbe ancor più complicata, sia per il minor numero di imprese qui operanti, sia per le ridotte risorse economiche delle imprese stesse. Comunque sia, per procedere correttamente nelle iniziative di digitalizzazione è fondamentale non perdere mai di vista gli obbiettivi primari conseguibili attraverso l’uso delle tecnologie informati che. Ovvero: produrre informazioni esclusivamente a supporto di processi decisionali di alta qualità, indispensabili per un successo produttivo. Per far ciò, al di là degli slogan tecnico-scientifici che richiamano non precisate innovazioni avveniristiche, è fondamentale maturare la consapevolezza della necessità sviluppare una solida “cultura informatica” basata sull’uso di sistemi informativi, ovvero di un insieme di tecnologie, dispositivi e applicazioni in grado di sostenere le attività di impresa nella loro quotidianità.
 |
| Figura 8 – Avveniristico progetto di un harvester totalmente robotizzato proposto dalla Barbro (www.behance.net/gallery/20374037/BARBRO-Autonomous-Harvester) |
Ciò non significa che anche il settore forestale dovrà essere “invaso” da nuove generazioni di tecnici informatici, tutt’altro. Significa, che i futuri tecnici forestali (ingegneri forestali?), veri protagonisti ed esperti del proprio dominio applicativo, dovranno acquisire le competenze informatiche e meccatroniche di base indispensabili per poter dialogare efficacemente con informatici ed ingegneri normalmente impegnati in altri settori. In altre parole: la progettazione di sistema di ogni soluzione orientata alla Foresta 4.0 dovrá rimanere integralmente nelle mani degli esperti agronomi e forestali, essendo i veri responsabili dell’analisi dei requisiti, quale indispensabile tappa preliminare di ogni attivitá progettuale. Gli esperti ICT dovranno semplicemente essere i consulenti cui delegare la progettazione di dettaglio dei singoli componenti, che comunque dovrá sempre rimanere sotto la diretta supervisione degli esperti del “dominio forestale”. E qui avrà un grande ruolo la futura formazione nel settore, a tutti i livelli.
Non si tratta di creare gli “informatici delle foresta”. Piuttosto, si tratta di formare i nuovi silvicoltori nella consapevolezza che gli orizzonti tecnologici si stanno incredibilmente allargando e potenziando, e che per poter operare correttamente in questo mondo è ormai diventato necessario allargare le proprie conoscenze di base anche con nuove discipline tecnico-organizzative e gestionali. Una sfida, questa, che tutti i silvicoltori dovranno saper raccogliere con sapiente consapevolezza.
Bibliografia
Gallo, R., Visser, R., Mazzetto, F. (2021) - Developing an automated monitoring system for cable yarding systems. Croatian Journal of Forest Engineering, 42 (2), pp. 213-225.
Carabin, G., Emanuelli, D., Gallo, R., Mazzetto, F., Vidoni, R. (2021) - Development of a Climbing-Robot for Spruce Pruning: Preliminary Design and First Results. CISM International Centre for Mechanical Sciences, Courses and Lectures, 601, pp. 100-108.
Oliveira, L.F.P., Moreira, A.P., Silva, M.F. (2021) - Advances in forest robotics: A state-of-the-art survey. Robotics, 10 (2), art. no. 53.
Singh, R., Gehlot, A., Vaseem Akram, S., Kumar Thakur, A., Buddhi, D., Kumar Das, P. (2021) - Forest 4.0: Digitalization of forest using the Internet of Things (IoT). Journal of King Saud University - Computer and Information Sciences.
Gallo, R., Mazzetto, F. (2019) - A solution for indirect mass assessment of timber during fully suspended yarding operations. 2019 IEEE International Workshop on Metrology for Agriculture and Forestry, MetroAgriFor 2019 - Proceedings, art. no. 8909282, pp. 333-338.
Sacco, P., Gallo, R., Mazzetto, F. (2019) - Data analysis and inference model for automating operational monitoring activities in Precision Farming and Precision Forestry applications. IOP Conference Series: Earth and Environmental Science, 275 (1), art. no. 012013, .
Gallo, R., Carabin, G., Vidoni, R., Sacco, P., Mazzetto, F. (2018) - Solutions for the automation of operational monitoring activities for agricultural and forestry tasks. Bodenkultur, 69 (3), pp. 131-140.
Englund, W., M, A., Andersson, H., Manne, J. (2017) – Semiautomated forwarder crane – development and evaluation in a simulator. Work Report Nr. 932–2017, Skogforsk, Sweden.
Christensen, H.I. (2016) - A Roadmap for US robotics from internet to robotics. 2016 Edition. University of California, San Diego, USA. Availalble online: http://jacobsschool.ucsd.edu/contextualrobotics/docs/rm3-final-rs.pdf
Loefgren, B. (2006) - Automation of forestry machines – an important piece in precision forestry. In Precision Forestry in plantations, Semi-natural and Natural Forests. Proceedings of the International Precision Forestry Symposium, Stellenbosch University, South Africa.
Courteau, J. (1989) - Robotics in forest harvesting machines. FERIC, Pointe Claire Quebec Canada

Professore Ordinario di Meccanica e Meccanizzazione (dal 2010) presso la Facoltà di Scienze e Tecnologie della Libera Università di Bolzano, ove ricopre anche il ruolo di Delegato del Rettore per la valutazione della Qualità della Ricerca a livello di Ateneo.
Nessun commento:
Posta un commento